





Sonde de température étanche – DS18B20
د.م. 39,00

Capteur de température LM35
د.م. 16,00
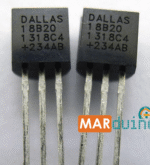
capteurs de température électroniques DS18B20
د.م. 19,00
Fiche technique
Tension :3 à 5,5 V
Utilisation Et Précision : Température
Plage de mesure : -55 / +125°C Précision : 0,5°C (-10 à 85°C)
-
 Livraison Par Amana Express
Livraison Par Amana Express
-
1 an de Garantie
-
Retours sous 7 jour
17
Items sold in last 3 minutes
100 en stock
15
People watching this product now!
Produits similaires




Choix des options
Ce produit a plusieurs variations. Les options peuvent être choisies sur la page du produit
 Arduino & Raspberry_Pi
Arduino & Raspberry_Pi Maison connectée
Maison connectée Videophone,sonnette
Videophone,sonnette Contrôle d’accès
Contrôle d’accès Eclairage
Eclairage Appareillages
Appareillages