








Module MOSFET IRF520 0-24V
د.م. 55,00

Mini panneau solaire en polycristalline
Plage de prix : د.م. 10,00 à د.م. 99,00
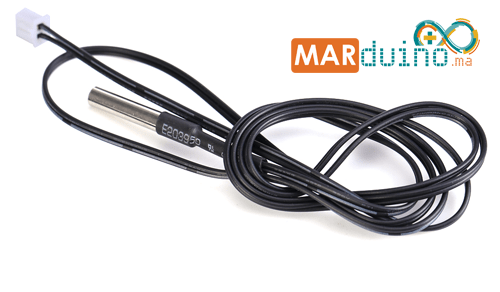
MCP2515 CAN Bus Module TJA1050 Recepteur SPI
د.م. 79,00
Support CAN V2.0 B, taux de Communication jusqu’à 1 mo/s
Alimentation: cc 5V, contrôle du protocole SPI
Courant de travail: 5mA,
Taille: 4*2.8 cm, courant de veille: 1uA
Température de fonctionnement: -40 C – + 85 C
Résistance terminale de 120 Ohm, adaptation d’impédance et garantie de la capacité de conduire
-
 Livraison Par Amana Express
Livraison Par Amana Express
-
1 an de Garantie
-
Retours sous 7 jour
14
Items sold in last 3 minutes
1 en stock
15
People watching this product now!
Produits similaires


-11%


 Arduino & Raspberry_Pi
Arduino & Raspberry_Pi Maison connectée
Maison connectée Videophone,sonnette
Videophone,sonnette Contrôle d’accès
Contrôle d’accès Eclairage
Eclairage Appareillages
Appareillages