










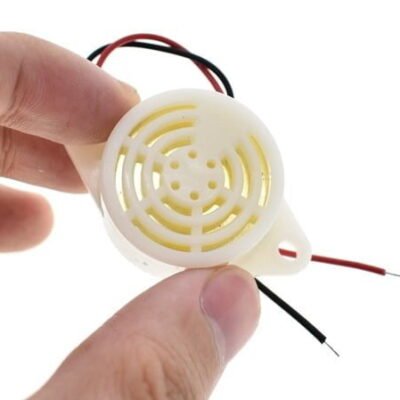
Buzzer alarme electronique3-24V-95 db
د.م. 18,00
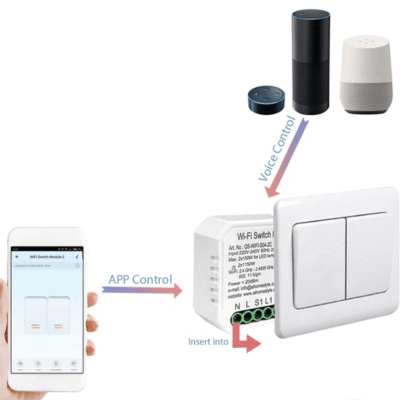
module de commutateur intelligent
Le prix initial était : د.م. 300,00.د.م. 239,00Le prix actuel est : د.م. 239,00.
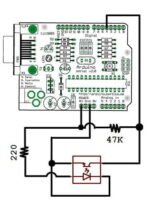
capteur optique infrarouge CNY70
د.م. 9,00
Le CNY70 est un capteur optique à réflexion. Il est composé d’une diode infrarouge et d’un phototransistor avec
un filtre contre la lumière visible. Il est utilisé dans les applications de détection de contraste à faible distance.
-
 Livraison Par Amana Express
Livraison Par Amana Express
-
1 an de Garantie
-
Retours sous 7 jour
12
Items sold in last 3 minutes
49 en stock
17
People watching this product now!
Produits similaires
-34%
Camera OV7670 Pour Arduino
Le prix initial était : د.م. 120,00.د.م. 79,00Le prix actuel est : د.م. 79,00.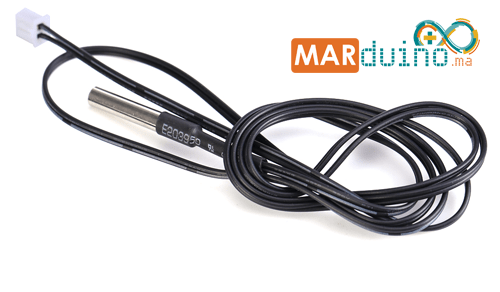

Choix des options
Ce produit a plusieurs variations. Les options peuvent être choisies sur la page du produit
capteur et détecter des gaz MQ, polluants et fumées
د.م. 39,00Choix des options Ce produit a plusieurs variations. Les options peuvent être choisies sur la page du produit
-11%
 Arduino & Raspberry_Pi
Arduino & Raspberry_Pi Maison connectée
Maison connectée Videophone,sonnette
Videophone,sonnette Contrôle d’accès
Contrôle d’accès Eclairage
Eclairage Appareillages
Appareillages