TCRT5000 Capteur optique IR/infrarouge réfléchissant




Capteurs & Modules, Electronique et Microcontrôleurs
TCRT5000 capteur optique IR/infrarouge réfléchissant
Availability:
10 en stock
Distance de détection : 12 mm
Longueur d’onde de fonctionnement : 950 mm
Méthode de détection : Réfléchissant
Tension inverse : 5V
Courant direct : 60mA
Courant de surtension direct : 3A
Dissipation de puissance de l’émetteur : 100mW
Tension émetteur collecteur : 70V
Tension collecteur émetteur : 5V
Courant collecteur : 100mA
Dissipation de puissance du détecteur : 100mW
Puissance dissipée totale du capteur : 200 mW
د.م. 5,00
10 en stock
ComparerBased on 0 reviews
Only logged in customers who have purchased this product may leave a review.
Produits similaires
- Electronique et Microcontrôleurs, Arduino & Raspberry_Pi, Capteurs & Modules
Shield Prototype pour Mega 2560 + Mini PCB Breadboard 170
-6% Electronique et Microcontrôleurs, Arduino & Raspberry_Pi, Capteurs & Modules
Electronique et Microcontrôleurs, Arduino & Raspberry_Pi, Capteurs & ModulesShield Prototype pour Mega 2560 + Mini PCB Breadboard 170
Type : logique ICS
État : neuf
uno2011 mega2560 prototype Shield protosshield V3 breadboard 170 W/min pour
Détails du produit :
Pour les méga protosshield V3 Board
État : neuf
Carte d’extension avec la technologie de traitement de l’immersion or PCB, cartes mères, petites or carré pavé espacement, composants de soudage plus facile
sop28 SMD package de composant pour être plus pratique pour les amateurs de produits électroniques ne seront pas directement insérer des composants liés
Vous pouvez coller Mini planche à pain, à travers le cavalier 7 couleurs pour compléter une variété de circuit tester, tableau indicateur de puissance intégré et voyants d’état, et les boutons reset, facile à apprendre Mega/mega2560 prototype préféré carte d’extension du contrôleur
Couleur comme images
Veuillez noter qu’en raison des effets d’éclairage, de surveiller les paramètres s luminosité/contrass ect, il pourrait y avoir quelques légères différences dans la tonalité des couleurs des images et l’objet réel.
Contenu de l’emballage :
1 x pour les méga protosshield V3 Board (L/min breadboard 170)
Type d’unité : pièce
Poids du colis : 0.08kg (0,1 kilogram.)
Taille du paquet : 5 cm x 5 cm x 5 cm (1.97in x 1,97 dans x 1,97 dans)SKU: n/a - Electronique et Microcontrôleurs, Capteurs & Modules, communication
Clavier Numérique 4X4 Matriciel Metalique
-11%Electronique et Microcontrôleurs, Capteurs & Modules, communicationClavier Numérique 4X4 Matriciel Metalique
- Modèle: FZ0840
- Matrice de boutons 16
- Il offre des chiffres 0-9, des lettres AD et des symboles étoile (*) et hash (#) standard.
- Communication facile avec n’importe quel microcontrôleur
- Taille: env. 7.00 * 6.50 * 1.00cm / 2.76 ” * 2.56 ” * 0.40 ”
SKU: n/a - Electronique et Microcontrôleurs, Capteurs & Modules
Joystick analogique2 axes et bouton (4directions)
Electronique et Microcontrôleurs, Capteurs & ModulesJoystick analogique2 axes et bouton (4directions)
Ce module joystick est composé de deux potentiomètres 10Kohm, et d’un bouton poussoir.
Le code à utiliser correspond donc à la combinaison de la lecture de deux entrées analogiques et d’une entrée digitale.Les deux potentiomètres et le bouton poussoir qui composent le joystick sont déjà pré relié ensemble de sorte à minimiser au maximum les connexions à 5 broches seulement:
5V → à connecter au 5V de l’arduino
GND → à connecter au GND de l’arduino
VRx et VRy → à connecter sur des pins analogiques de l’arduino pour lecture analogique des deux axes du joystick
SW → à connecter sur une entrée digitale de l’arduino pour lire l’état, pressé ou non du bouton.
Le débattement angulaire du joystick est d’environ 30° sur chacun des deux axes.
4 trous de fixations de diamètre 3mm permettent de facilement fixer le module au support de votre choix.
Ce module peut facilement être combiné avec un NodeMCU pour piloter un robot à distance.
Ce module peut aussi être facilement détourné pour servir de capteur pour des robots!
SKU: n/a - Electronique et Microcontrôleurs, Capteurs & Modules
Capteur à ultrasons HC-SR04
On ne présente plus le HC-SR04, c’est le capteur de mesure de distance par ultrasons permettant entre autre à vos robots d’éviter des obstacles en toute sérénité.
Avec son cône d’action d’environ 15° et sa plage de détection comprise entre entre 3cm et 3m, il permet de détecter les objets proches et de connaitre leurs distances dans un champs d’action ni trop étroit ni trop étendu. Pour couvrir une plus large zone, plusieurs méthodes peuvent être adoptées : utiliser plusieurs capteurs HC-SR04 ou bien en fixer un sur un servo moteur.
Puisqu’il utilise la technologie ultrasons ce capteur est utilisable pour détecter tout type d’objet, y compris les objets transparents et même les liquides, aussi bien dans le noir que dans le brouillard !Bref le HC-SR04 est un vrai couteau suisse de la détection, pour un prix ultra-réduit !
Pour les applications nécessitant un angle de détection étroit , pour localiser précisément un rebord par exemple, il faut néanmoins privilégier les capteur de distance infra-rouge ; comme le capteur sharpGP2Y0A02YK0F pour les distances de 10cm à 80cm, le capteur sharp GP2Y0A41SK0F pour les distances de 4 à 30cm ou encore le capteur sharp GP2Y0A02YK0F pour les distances de 20 à 150 cm; ou encore des télémètres laser. Il existe aussi des capteurs de mesure de distance dit à temps de vol ( time of flight range sensor ) basé aussi sur du laser comme le capteur VL53L0X.
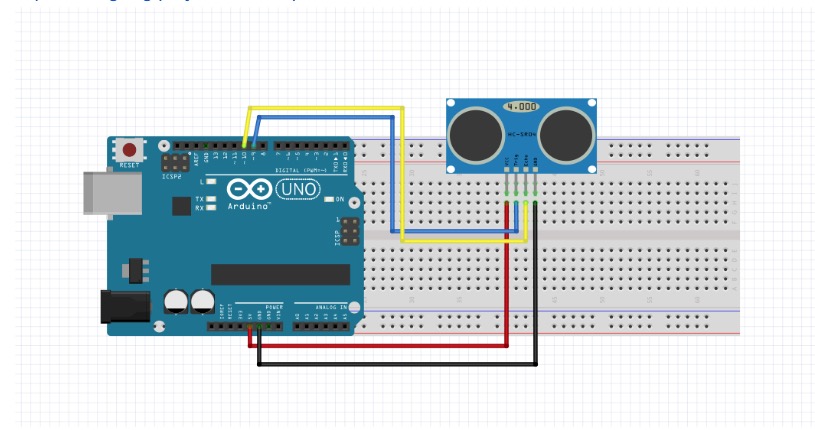
Connecter le capteur HC-SR04 avec une Arduino UNO et une breadboard

Lien vers la datasheet du capteur HC-SR04.
Exemple de code Arduino pour l’utilisation du capteur HC-SR04
Nous vous proposons un code d’exemple pour le fonctionnement du capteur. Pour avoir plus d’informations sur ce capteur et comment l’utiliser, nous vous proposons ce tutoriel pour utiliser le capteur ultrasons HC-SR04 avec arduino .
#define TRIGG 9 // Broche TRIGGER
#define ECHO 10 // Broche ECHO
// definition du Timeout
const long TIMEOUT = 25000UL; // 25ms = ~8m à 340m/sfloat son= 340.0 / 1000; //vitesse du son dans l’air (mm/µs)
void setup() {
pinMode(TRIGG, OUTPUT); //Configuration des broches
digitalWrite(TRIGG, LOW); // La broche TRIGGER doit être à LOW au repos
pinMode(ECHO, INPUT);Serial.begin(9600); //Démarrage de la liaison série
}void loop() {
digitalWrite(TRIGG, HIGH); // Lance une mesure de distance en envoyant
delayMicroseconds(10); //une impulsion HIGH de 10µs sur la broche TRIGGER
digitalWrite(TRIGG, LOW);int mesure = pulseIn(ECHO, HIGH, TIMEOUT); // Mesure le temps entre
// l’envoi de l’ultrason et sa réceptionfloat distance_mm = mesure / 2.0 * son; //calcul de la distance grâce au temps
//on divise par 2 car le son fait un aller-retourSerial.print(“Distance: “); //Affichage des résultats
Serial.print(distance_mm);
Serial.println(“mm”);delay(500); //temps entre chaque mesure (ms)
}SKU: n/a






There are no reviews yet.