Alimentation: 5 Vcc
Consommation: <10 mA
Distance de détection : 1 à 20 mm
Sortie: TTL
Dimensions: 35 x 11 x 15 mm



10 en stock
Module Suiveur Ligne Reflexion IR TCRT5000 Arduino.
Ce module TCRT5000 contient un émetteur et récepteur d’ondes infrarouges. Il est très souvent utilisé pour la fabrication de robots suiveurs de lignes.
د.م. 22,00
10 en stock
ComparerAlimentation: 5 Vcc
Consommation: <10 mA
Distance de détection : 1 à 20 mm
Sortie: TTL
Dimensions: 35 x 11 x 15 mm
Only logged in customers who have purchased this product may leave a review.

Distance de détection : 12 mm
Longueur d’onde de fonctionnement : 950 mm
Méthode de détection : Réfléchissant
Tension inverse : 5V
Courant direct : 60mA
Courant de surtension direct : 3A
Dissipation de puissance de l’émetteur : 100mW
Tension émetteur collecteur : 70V
Tension collecteur émetteur : 5V
Courant collecteur : 100mA
Dissipation de puissance du détecteur : 100mW
Puissance dissipée totale du capteur : 200 mW
Caractéristique :
1. Utilisation du capteur de thermistance NTC, bonne sensibilité
2. La forme d’onde propre du signal de sortie du comparateur est bonne, capacité de conduite, que 15mA.
3. Ajustez le seuil de détection de bit de distribution de température
4. Tension de fonctionnement 3.3V-5V
5. Le format de sortie: sortie de commutation numérique (0 et 1)
6. Avec des trous de boulon pour une installation facile
7. Une petite taille de carte PCB: 3.2cm x 1.4cm
8. En utilisant un comparateur de tension large LM393
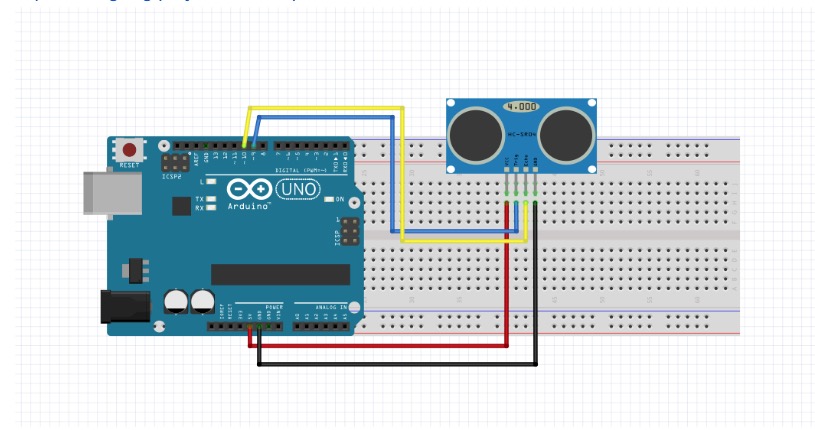
On ne présente plus le HC-SR04, c’est le capteur de mesure de distance par ultrasons permettant entre autre à vos robots d’éviter des obstacles en toute sérénité.
Avec son cône d’action d’environ 15° et sa plage de détection comprise entre entre 3cm et 3m, il permet de détecter les objets proches et de connaitre leurs distances dans un champs d’action ni trop étroit ni trop étendu. Pour couvrir une plus large zone, plusieurs méthodes peuvent être adoptées : utiliser plusieurs capteurs HC-SR04 ou bien en fixer un sur un servo moteur.
Puisqu’il utilise la technologie ultrasons ce capteur est utilisable pour détecter tout type d’objet, y compris les objets transparents et même les liquides, aussi bien dans le noir que dans le brouillard !
Bref le HC-SR04 est un vrai couteau suisse de la détection, pour un prix ultra-réduit !
Pour les applications nécessitant un angle de détection étroit , pour localiser précisément un rebord par exemple, il faut néanmoins privilégier les capteur de distance infra-rouge ; comme le capteur sharpGP2Y0A02YK0F pour les distances de 10cm à 80cm, le capteur sharp GP2Y0A41SK0F pour les distances de 4 à 30cm ou encore le capteur sharp GP2Y0A02YK0F pour les distances de 20 à 150 cm; ou encore des télémètres laser. Il existe aussi des capteurs de mesure de distance dit à temps de vol ( time of flight range sensor ) basé aussi sur du laser comme le capteur VL53L0X.
Lien vers la datasheet du capteur HC-SR04.
Nous vous proposons un code d’exemple pour le fonctionnement du capteur. Pour avoir plus d’informations sur ce capteur et comment l’utiliser, nous vous proposons ce tutoriel pour utiliser le capteur ultrasons HC-SR04 avec arduino .
#define TRIGG 9 // Broche TRIGGER
#define ECHO 10 // Broche ECHO
// definition du Timeout
const long TIMEOUT = 25000UL; // 25ms = ~8m à 340m/s
float son= 340.0 / 1000; //vitesse du son dans l’air (mm/µs)
void setup() {
pinMode(TRIGG, OUTPUT); //Configuration des broches
digitalWrite(TRIGG, LOW); // La broche TRIGGER doit être à LOW au repos
pinMode(ECHO, INPUT);
Serial.begin(9600); //Démarrage de la liaison série
}
void loop() {
digitalWrite(TRIGG, HIGH); // Lance une mesure de distance en envoyant
delayMicroseconds(10); //une impulsion HIGH de 10µs sur la broche TRIGGER
digitalWrite(TRIGG, LOW);
int mesure = pulseIn(ECHO, HIGH, TIMEOUT); // Mesure le temps entre
// l’envoi de l’ultrason et sa réception
float distance_mm = mesure / 2.0 * son; //calcul de la distance grâce au temps
//on divise par 2 car le son fait un aller-retour
Serial.print(“Distance: “); //Affichage des résultats
Serial.print(distance_mm);
Serial.println(“mm”);
delay(500); //temps entre chaque mesure (ms)
}




There are no reviews yet.