Alimentation: 5 Vcc
Consommation: <10 mA
Distance de détection : 1 à 20 mm
Sortie: TTL
Dimensions: 35 x 11 x 15 mm



10 en stock
Module Suiveur Ligne Reflexion IR TCRT5000 Arduino.
Ce module TCRT5000 contient un émetteur et récepteur d’ondes infrarouges. Il est très souvent utilisé pour la fabrication de robots suiveurs de lignes.
د.م. 22,00
10 en stock
ComparerAlimentation: 5 Vcc
Consommation: <10 mA
Distance de détection : 1 à 20 mm
Sortie: TTL
Dimensions: 35 x 11 x 15 mm
Only logged in customers who have purchased this product may leave a review.

Distance de détection : 12 mm
Longueur d’onde de fonctionnement : 950 mm
Méthode de détection : Réfléchissant
Tension inverse : 5V
Courant direct : 60mA
Courant de surtension direct : 3A
Dissipation de puissance de l’émetteur : 100mW
Tension émetteur collecteur : 70V
Tension collecteur émetteur : 5V
Courant collecteur : 100mA
Dissipation de puissance du détecteur : 100mW
Puissance dissipée totale du capteur : 200 mW
Cette platine est conçue pour venir s’enficher sur des bases Arduino UNO “UNO-328” et modèles compatibles.
ce kit permet le prototypage et l’ajout de composants divers, La platine dispose d’une large zone pastillée vierge.
L’ensemble des signaux de votre Arduino seront accessibles sur des connecteurs femelles afin que vous puissiez venir vous y raccorder ou encore enficher d’autres platines “Shield” par dessus.
La platine est livrée avec 2 Leds disposant d’emplacements pré-définis avec des connexions permettant de les piloter par votre Arduino.
Un bouton-poussoir de Reset (pour l’Arduino) ainsi qu’un second bouton-poussoir libre d’utilisation sont également présents.
Livré avec sa planche de montage (breadboard)
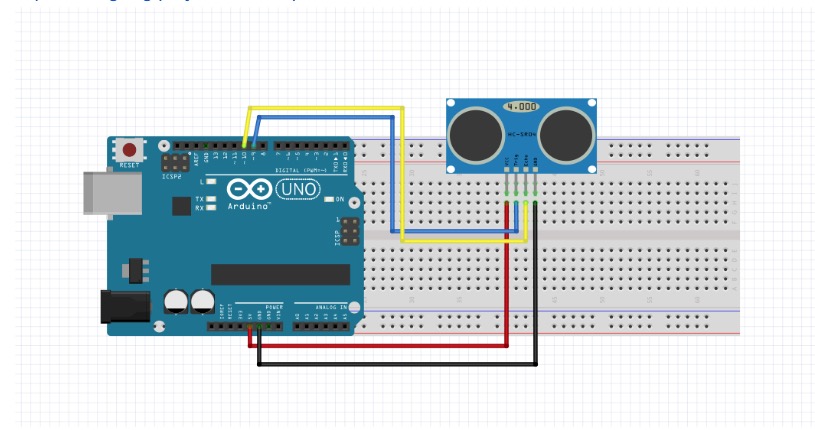
On ne présente plus le HC-SR04, c’est le capteur de mesure de distance par ultrasons permettant entre autre à vos robots d’éviter des obstacles en toute sérénité.
Avec son cône d’action d’environ 15° et sa plage de détection comprise entre entre 3cm et 3m, il permet de détecter les objets proches et de connaitre leurs distances dans un champs d’action ni trop étroit ni trop étendu. Pour couvrir une plus large zone, plusieurs méthodes peuvent être adoptées : utiliser plusieurs capteurs HC-SR04 ou bien en fixer un sur un servo moteur.
Puisqu’il utilise la technologie ultrasons ce capteur est utilisable pour détecter tout type d’objet, y compris les objets transparents et même les liquides, aussi bien dans le noir que dans le brouillard !
Bref le HC-SR04 est un vrai couteau suisse de la détection, pour un prix ultra-réduit !
Pour les applications nécessitant un angle de détection étroit , pour localiser précisément un rebord par exemple, il faut néanmoins privilégier les capteur de distance infra-rouge ; comme le capteur sharpGP2Y0A02YK0F pour les distances de 10cm à 80cm, le capteur sharp GP2Y0A41SK0F pour les distances de 4 à 30cm ou encore le capteur sharp GP2Y0A02YK0F pour les distances de 20 à 150 cm; ou encore des télémètres laser. Il existe aussi des capteurs de mesure de distance dit à temps de vol ( time of flight range sensor ) basé aussi sur du laser comme le capteur VL53L0X.
Lien vers la datasheet du capteur HC-SR04.
Nous vous proposons un code d’exemple pour le fonctionnement du capteur. Pour avoir plus d’informations sur ce capteur et comment l’utiliser, nous vous proposons ce tutoriel pour utiliser le capteur ultrasons HC-SR04 avec arduino .
#define TRIGG 9 // Broche TRIGGER
#define ECHO 10 // Broche ECHO
// definition du Timeout
const long TIMEOUT = 25000UL; // 25ms = ~8m à 340m/s
float son= 340.0 / 1000; //vitesse du son dans l’air (mm/µs)
void setup() {
pinMode(TRIGG, OUTPUT); //Configuration des broches
digitalWrite(TRIGG, LOW); // La broche TRIGGER doit être à LOW au repos
pinMode(ECHO, INPUT);
Serial.begin(9600); //Démarrage de la liaison série
}
void loop() {
digitalWrite(TRIGG, HIGH); // Lance une mesure de distance en envoyant
delayMicroseconds(10); //une impulsion HIGH de 10µs sur la broche TRIGGER
digitalWrite(TRIGG, LOW);
int mesure = pulseIn(ECHO, HIGH, TIMEOUT); // Mesure le temps entre
// l’envoi de l’ultrason et sa réception
float distance_mm = mesure / 2.0 * son; //calcul de la distance grâce au temps
//on divise par 2 car le son fait un aller-retour
Serial.print(“Distance: “); //Affichage des résultats
Serial.print(distance_mm);
Serial.println(“mm”);
delay(500); //temps entre chaque mesure (ms)
}
Principe de fonctionnement
Le relais est constitué d’un électroaimant et d’un contacteur mécanique. Lorsque le courant est suffisamment important sur la bornes d’entrée, le solénoïde se magnétise ce qui force le contacteur à fermer le circuit de puissance. Comme il n’y a pas de liaison mécanique entre le circuit de commande et le circuit de puissance (actionnement magnétique), il y a une isolation galvanique entre les deux circuits; ce qui permet de protéger le circuit de commande.
Schéma
Nous allons voir ici le branchement d’un module relais qui est souvent présent dans les kits d’électronique. Il y a trois broches d’entrée (Signal, Vcc, Gnd) comme pour un servomoteur. Le relais se branche généralement sur une sortie digitale du microcontrôleur. Il y a généralement un bornier 3 plots en sortie du module qui corresponde aux sorties Naturellement Ouvert (NO), commun (COM) et Naturellement fermé (NC). L’appareil en sortie sera relié à la borne COM et la borne NC ou NO selon votre utilisation.
En générale, on choisit le mode le plus sécuritaire en cas d’un défaut de commande. Par exemple, le relais coupe le circuit alimentant la chaudière en cas de problème pour éviter qu’elle ne chauffe en continue.
Code
Le code pour piloter un relais est aussi simple que de passer une broche à l’état haut ou à l’état bas. Pour cela nous utilisons la fonction digitalWrite().
//Parameters
const int digPin = 2;
void setup() {
//Init Serial USB
Serial.begin(9600);
Serial.println(F(“Initialize System”));
//Init pwm output
pinMode(digPin, OUTPUT);
}
void loop() {
digitalWrite(digPin, HIGH);
delay(500);
digitalWrite(digPin, LOW);
delay(500);
}
Copy
Résultat
Sur certains modules relais se trouve une LED pour vous aider à observer l’état du relais. Lorsque le relais se ferme, la LED s’allume et il émet un son mécanique. Si ce son n’est pas compatible avec votre application, il vous faudra vous tourner vers l’utilisation de transistor(DC) ou triac(AC).






There are no reviews yet.